docs
つくるっちでのDTR/RTS制御について
つくるっちではロボットとの接続/切断時(物理的な接続切断でなくアプリ上での接続切断)にロボットをRESETしてます。つくるっちが対応しているATmega328p / ESP32 / SAMD(Koov)はそれぞれUARTのDTR/RTS信号をRESET, BOOT モード切り替えに使っており、各プラットフォームごとに方法が異なります。
| ATmega328p | ESP32 | Koov/SAMD | |
|---|---|---|---|
| I/F | 3線式 (RxD,TxD,DTR) | 4線式 (RxD,TxD,DTR,RTS) | 2線式? (RxD,TxD) マイコン内蔵 |
| RESET端子(EN端子) | DTRがC経由で接続, DTR=H->Lの瞬間L |
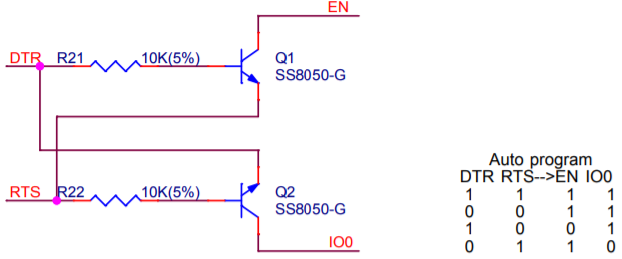
(DTR=H,RTS=L)でL, Cで遅延 | |
| MODE端子(IO0) | (DTR=L,RTS=H)でL | ||
| BOOTモード | RESET直後に 特定のコマンドを送信 |
MODE端子=LでRESET (DTR=H->L, RTS=L->H) |
1200bpsでUART接続 |
| Bootloader書き込み | できない | できる | ? |
接続/切断時のRESETについて
| ATmega328p | WemosD1R32 | QCAI | Koov/SAMD | |
|---|---|---|---|---|
| Teraterm 接続中DTR=L,RTS=L |
Y(接続時) | Y(切断時) ※PC依存ありそうDTR↑から400us後にRTS↑ |
同左? | なし |
| Tukurutch3.0 接続中DTR=L,RTS=L |
Y(接続時) | Y(切断時) DTR↑、RTS↑ |
Y(切断時) . |
- |
| Tukurutch2.0 接続中DTR=L,RTS=H |
Y(接続時) | Y(切断時ソフトRESET)※接続中のRESETボタンでBOOTモードになる |
同左 | Y(切断時ソフトRESET) |
DevkitCの回路図より